Wrist rehabilitation device.
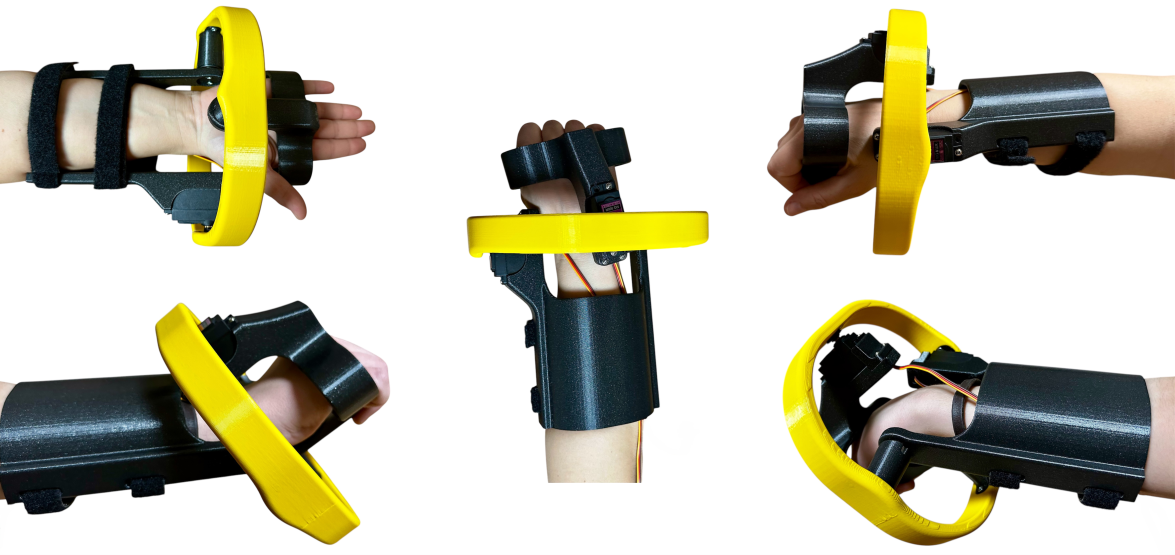
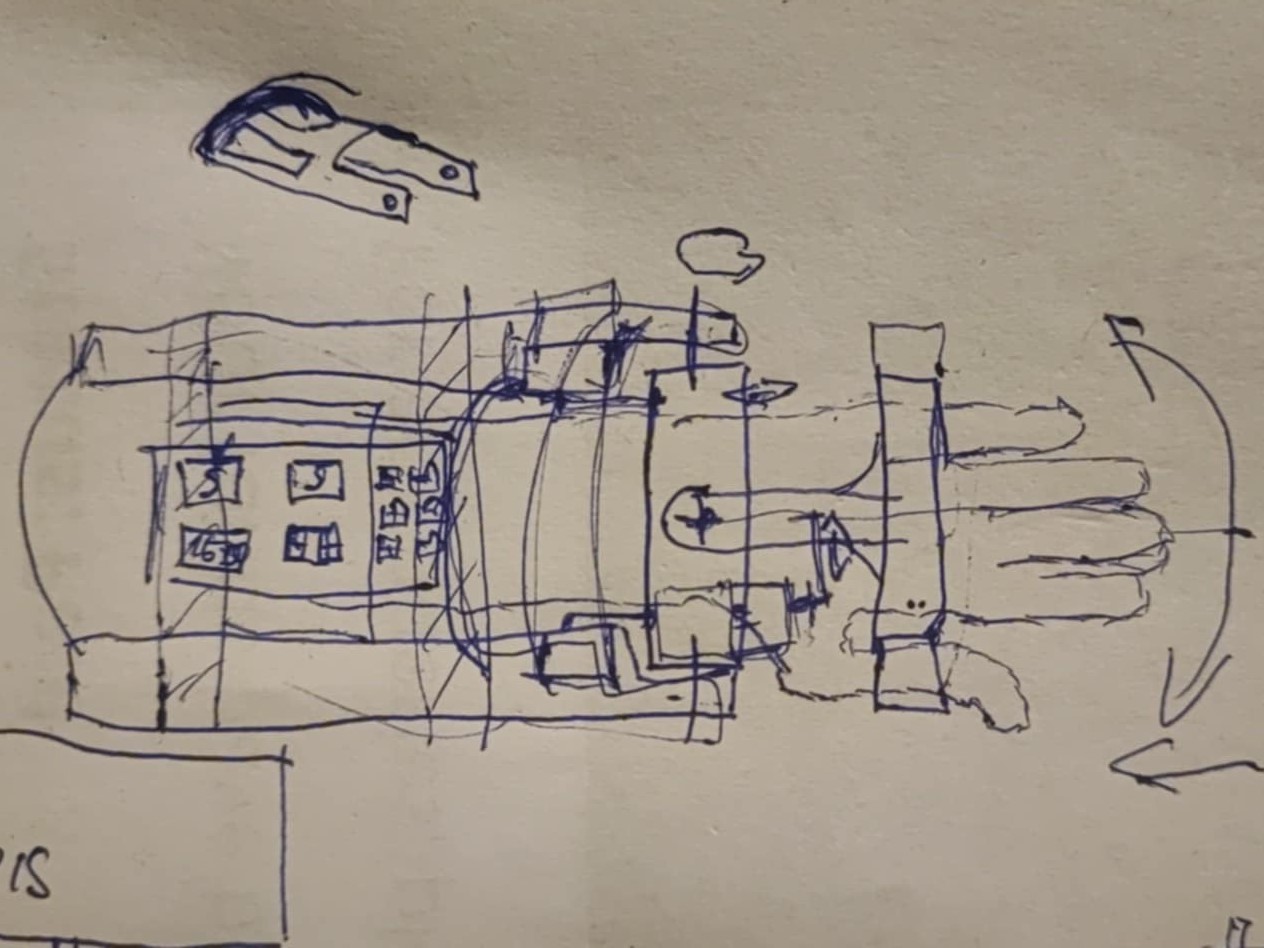
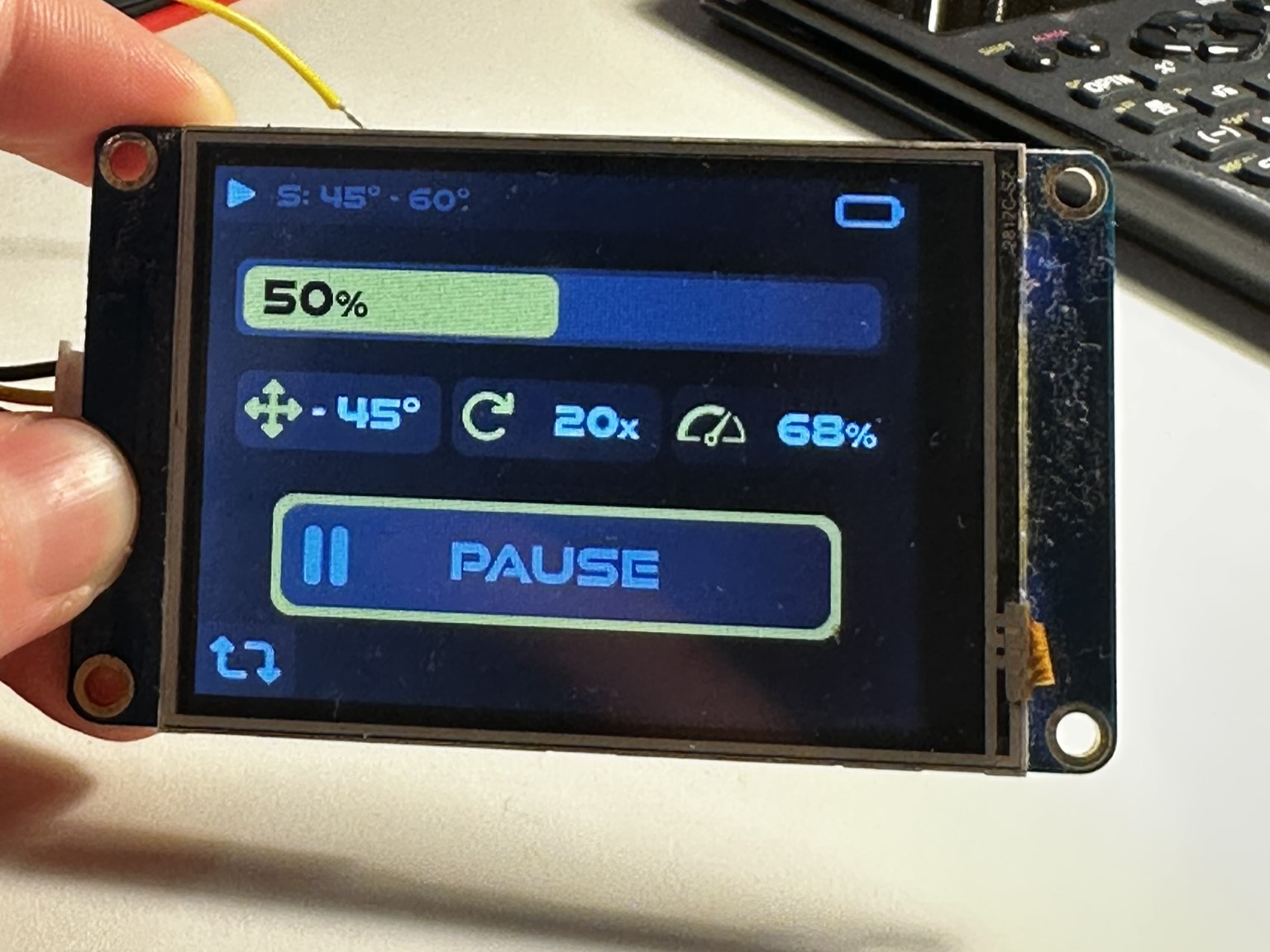
A wearable mechatronic device for wrist rehabilitation. Using servo motors, with manual degree input via a Nextion touchscreen. Developed with clinical consultation. Built from scratch — CAD, electronics, firmware, and all.
SOČ 2025 — National Round
🏆 Mladý Tvorca — 3rd Place
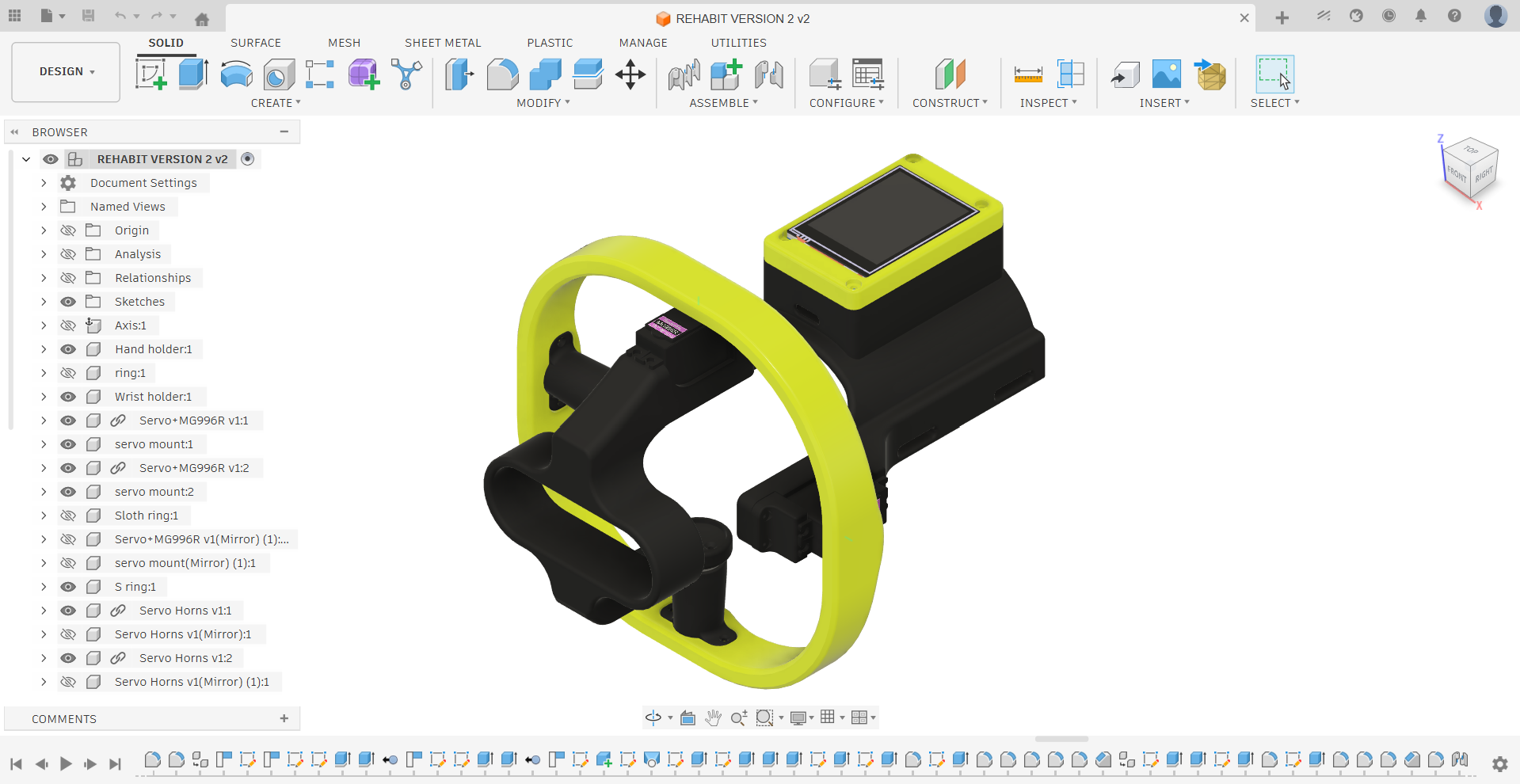
Fusion 360
ESP32
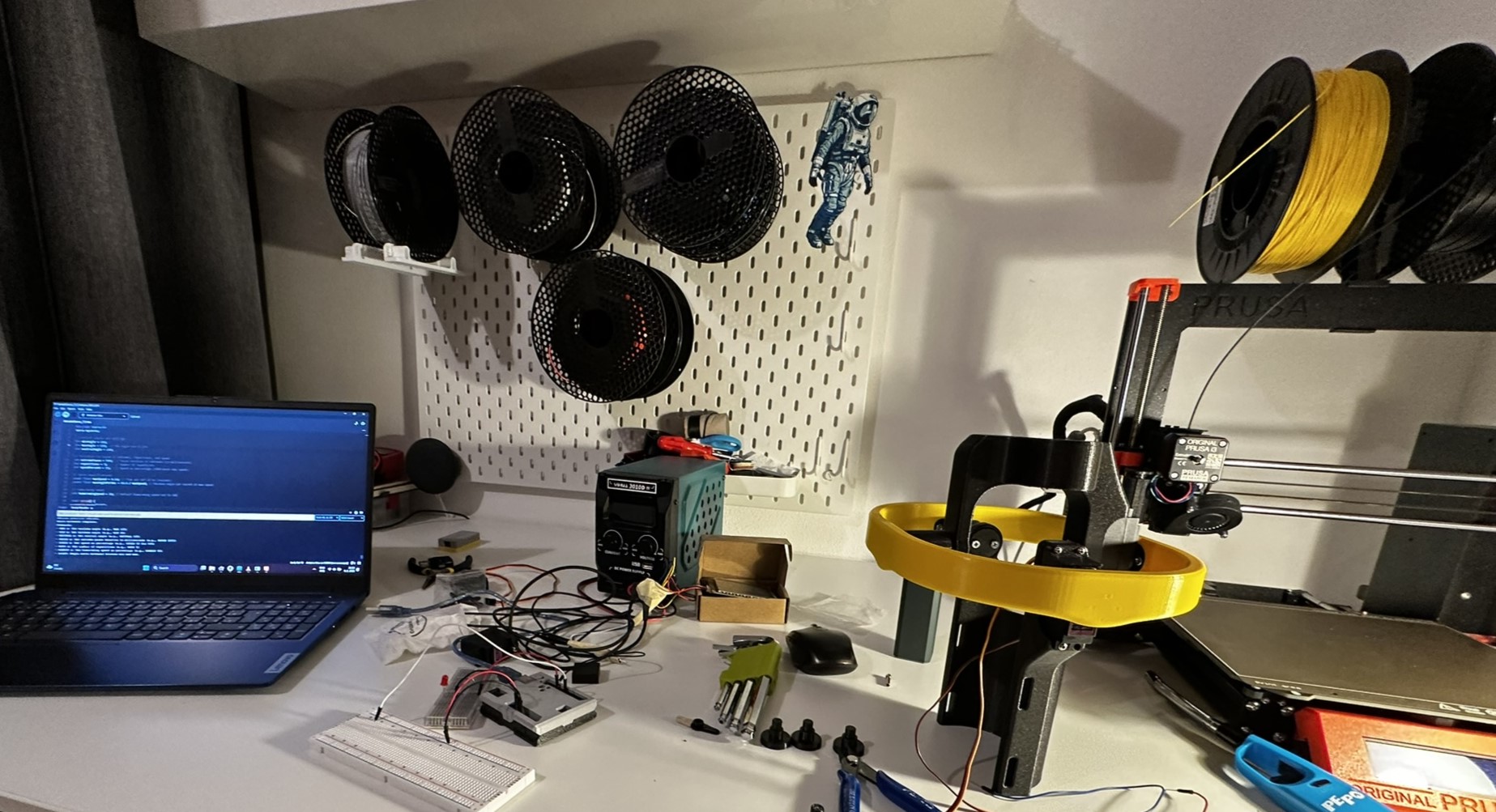
PETG Print